

翟明达 龙志强 张璐
国防科技大学 湖南 长沙 410073
前言
随着磁浮轨道交通工程化应用的快速发展,对整个磁浮系统的可靠性和安全性提出了迫切需要。磁浮列车因其主动式的悬浮控制使得车辆与轨道脱离接触而带来许多工程方面的优点,但也使得每辆车的电气系统变得比较复杂,且运营的磁浮列车大都由多辆编组组成,进一步加重了状态监测、故障诊断的任务量和复杂性。另外磁浮交通系统中的运行控制、地面供电、线路轨道等系统的部件或设备发生故障都会影响到列车系统的运行。因此,磁浮列车状态监测与故障诊断技术逐渐成为研究的焦点。
电磁型磁浮列车分类
磁浮列车根据悬浮原理可分为电磁悬浮型、电动悬浮型、超导钉扎悬浮型、和永磁斥力悬浮型。其中,电磁悬浮型磁浮列车发展最为成熟,目前国内外实现商业运行的磁浮交通系统均采用电磁悬浮型磁浮列车。根据运行速度的不同,电磁悬浮型磁浮列车又分为中低速和高速磁浮列车。中低速型磁浮列车最高速度为120~160km/h,主要解决城市内部的交通运输问题,造价与轻轨相当;高速磁浮列车最高速度为400~600km/h,适合作为城市间的交通工具。
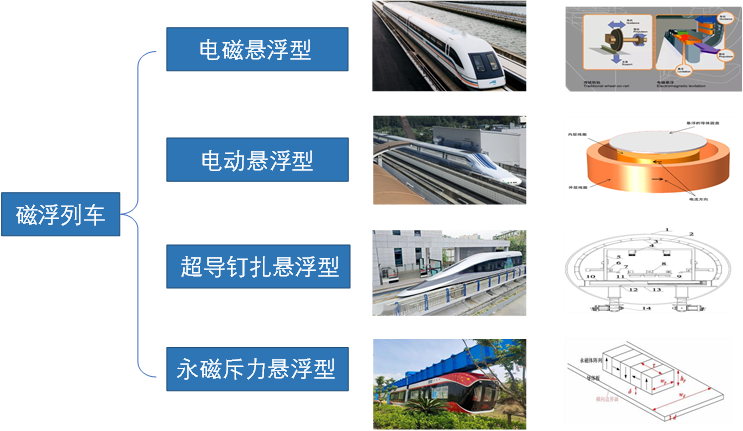
图1 磁浮列车分类
磁浮列车的特点
虽然中低速和高速磁浮列车在牵引、导向、供电以及运行控制方面存在较大差异,但是两者的悬浮原理非常相似,均采用主动式的电磁悬浮原理,利用在车体底部的可控悬浮电磁铁和安装在导轨底面的铁磁反应轨之间的吸引力使列车浮起。由于磁浮列车采用非接触运行方式,与普通轮轨系统相比,它具有多种特点,具体如下:
(1)振动小、噪音低,有利于环境保护,且乘坐平稳、舒适;
磁浮列车采用电磁引力使车辆悬浮在轨道上面,不存在车轮和轨道接触产生的噪音或振动;由于没有车轮磨耗,也不会在运行中产生粉尘等空气污染,有利于环境保护;由于车身与轨道之间无接触,运行平稳,舒适性好。
(2)转弯半径小,爬坡能力强,线路适应性好;
磁浮列车的行驶和制动靠直线电机产生的电磁牵引力,因而车辆具有很好的加减速性能及爬坡能力。中低速磁浮列车的转弯半径可以很小,在城市大的道路交叉路口即可完成转弯。因此,中低速磁浮列车轨道交通线路在狭窄地域,特别是建筑密集的城市区域,有较强的线路适应能力。
(3)建造和维护成本低;
磁浮列车爬坡能力强、转弯半径小,适合复杂地形和密集城市空间,可以做到不拆迁或少拆迁,不征地或少征地,从而可降低建造成本;磁浮列车车体重量轻并均匀地分布在轨道上,因此可以使桥梁结构轻量化,从而降低土建结构的投资。磁浮列车与轨道没有接触摩擦,可以降低车辆和轨道的维护费用。
(4)列车“抱轨”运行,行驶安全性好,运营速度高;
高速磁浮列车最高运行时速可达到600公里,列车“抱轨”运行,车轨一体,不会发生脱轨和翻车事故;即使停电,也有车载电源维持悬浮,直到安全停车;冗余部件设计等使得高速磁浮列车具有很好的安全性能。
中低速磁浮列车商业线路运营现状
2013年以来,我国先后建设了北京、长沙、清远、凤凰等中低速磁浮运营线或磁浮旅游线。
长沙磁浮快线于2014年5月开工,2016年5月6日开通试运营,如图10所示。长沙磁浮车最高运行速度为100km/h,最大承客量(三节编组)为363人(半节车用于行李托运)。自开通试运营以来,截至2023年2月28日,长沙磁浮快线已安全运营2490天,累计开行361225列次,运营总里程668万公里,客流总量1967万人次,列车正点率为99.9%。2021年4月,湖南启动了长沙磁浮快线东延建设,长沙磁浮东延线将接入黄花国际机场T3航站楼(在建),延长线路全长4.454km。

图2 长沙磁浮快线磁浮列车(2014)
北京中低速磁浮示范运营线(简称北京S1线)于2013年10月正式开工,2017年12月30日开始投入运营。线路全长10.2km,共设车站8座,全部为高架站。北京S1线采用6辆编组,定员载客量1032人,最高运行速度为80-100km/h。

图3 北京中低速磁浮示范运营线磁浮列车(2013)
湖南凤凰磁浮文化旅游项目共分三期实施。一期工程以张吉怀高铁凤凰站为起点,到民俗园隧道口,全长9.121km,设4座车站,将串联起凤凰各主要景点。该中低速磁浮列车采用采用三辆编组,设计时速100km/h。湖南凤凰磁浮旅游线于2019年7月开工建设,2021年12月开通试运行,正在进行运营的磁浮列车如图4所示。

图4 湖南凤凰磁浮旅游线磁浮列车(2021)
广东清远磁浮工程旅游专线(简称清远磁浮)于2018 年5月正式开工建设,计划2023年10月开始投入运营。清远磁浮作为清远市南部旅游集聚区重要交通配套设施,沿线共设4站。工程线路全长8.014km,列车采用3辆编组(可采用3 3重联运行),定员载客量340人,最高运行速度为120km/h,投入运营的磁浮列车如图5所示。

图5 广东清远磁浮旅游线磁浮列车(2022)
磁浮列车状态监测与故障诊断设计
磁浮列车的状态监测和故障综合评估系统主要由两大部分组成:车载状态监测与故障综合评估系统(以下简称车载系统)、地面状态监测与故障综合评估系统(以下简称地面系统)。车载和地面系统相互协作,共同完成对磁浮列车系统的状态监测和故障综合评估。
车载系统负责采集列车车载悬浮、车载辅助供电、牵引、制动等子系统的运行状态数据,并将采集到的数据一方面传送至头车驾驶室内的列车级诊断计算机进行故障综合评估,另一方面,利用车载无线通信装置(TSC),将关键运行状态数据和故障评估结果发送到地面系统。
地面系统分为车辆远程诊断系统、地面变电站监测系统、道岔监控系统和运行控制监测四个子系统,分别采集车辆系统、变电站、道岔系统和运行控制系统的状态信息,地面系统综合各个子系统的状态和故障数据,对整个中低速磁浮交通系统的运行状况进行故障综合评价,为地面运行指挥决策提供依据,为运行维护提供支持。
车载和地面状态监测与故障综合评估系统总体结构如图6所示。
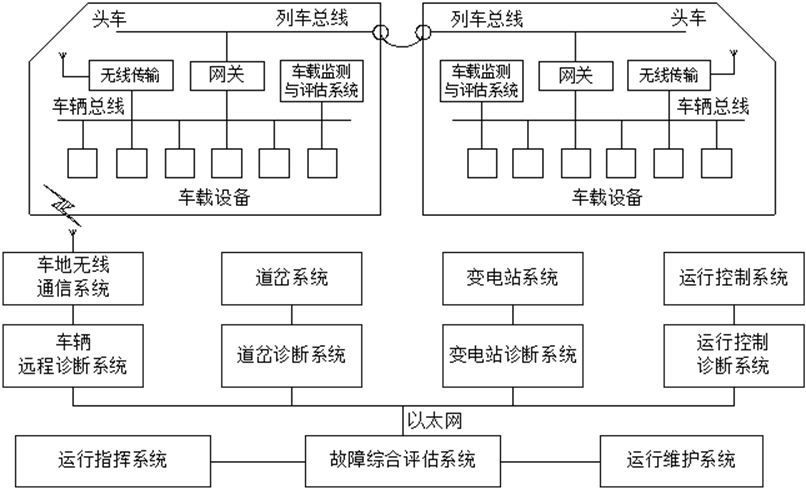
图6磁浮列车状态监测与故障评估系统硬件框架示意图
对磁浮列车故障综合评估正是依靠本套状态监测系统所获得的故障信息来实现的,系统具体的工作流程如下:
车载系统通过车辆总线收集车载底层设备的状态信息,同时经过网关从列车总线收集同列车中其他车辆底层设备的状态信息,系统对列车设备运行状态进行综合分析处理,对故障状态进行综合评估处理,并把信息分析处理结果通过无线传输装置发送到地面车辆远程诊断系统。
在地面的故障综合评估系统中,车辆远程诊断系统通过车地无线通信系统接收车载电气设备各种状态信息;线路道岔监测与评估子系统采集道岔现场行程开关、驱动组件等设备状态信息;变电站监测与评估子系统收集地面变电所内各种电压电流设备状态信息;运行控制监测与评估子系统采集地面运行控制室各种仪器设备状态信息。所有这些子系统对采集到的状态数据进行分析处理后,通过以太网将各子系统状态监测和故障评估情况发送给地面故障综合评估系统,由此实现对列车系统故障情况的综合评价,为系统的运行指挥以及运行维护提供依据。
展望未来:磁浮列车状态监测与故障诊断的智能化
随着科技的进步与发展,磁浮列车的状态监测与故障诊断技术越来越向着智能化、网络化发展,如何将人工智能、物联网等新技术合理运用以提升智能化水平,已成为当前研究人员广泛关注和研究的热点。
磁浮列车智能专家诊断系统通过运用大数据、人工智能等先进技术手段及模糊逻辑等推理算法,对磁浮列车进行运行状态监测和故障预测,评估磁浮列车健康状况,并结合维修资源情况,给出合适的维修决策,以实现关键设备和部件的预测性维修,保证磁浮列车高质量的运营。通过系统中的车载状态监测设备可以采集磁浮列车的实时状态数据,并进行实时监控,对磁浮列车运行的异常状态进行智能报警,并对磁浮列车状态数据信息进行预处理,搭建数据分析模型,通过科学算法实现对磁浮列车关键部件的故障预测及健康管理。磁浮列车智能专家诊断系统主要分为四个部分,如下图所示:
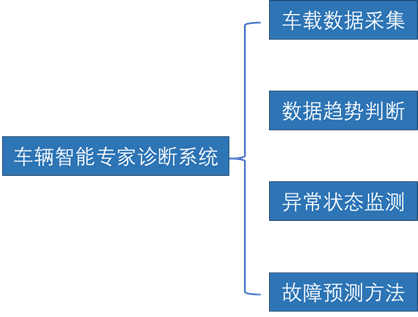
图7 磁浮列车智能专家诊断系统
(1)车载数据采集:通过传感器、数据采集终端等途径实现数据采集,然后通过5G等车地无线传输方式实时获取磁浮列车运行数据进行状态监测。
(2)数据趋势判断:获取磁浮列车运行状态数据后,根据系统或部件的历史监控数据,对于专家系统给定阈值内的数据抖动进行变化趋势分析和比对,一旦发现异常立即发出报警信号,进行预测检修。
(3)异常状态监测:系统提取关键数据指标和过程变量作为故障判断的参照,对所有数据进行统计并进行数据重组,然后,将同一磁浮列车的设备状态数据作为学习样本,采用无监督机器学习算法对所得数据进行异常检测。
(4)故障预测方法:采用基于故障数据点的有监督机器学习方法。首先,对数据进行特征扩充操作,进行数据标记,选择样本数据;然后执行数据降维、归一化、均衡处理等预处理流程,再将数据集按相应的比例分割为训练集和测试集;最后采用机器学习算法对训练集进行学习,并用故障前一段时间窗的数据作为验证训练集和测试集的数学模型,实现异常点的故障预警模型验证,当检测出连续出现的异常点时,可进行故障预警。
磁浮列车的状态监测与故障诊断技术未来一定会更进一步提高智能化水平,以期实现对列车的全覆盖状态监测和数据获取,缩短设备的维修时间,减少磁浮列车运营期间的故障风险,提高运营质量,保障运营安全。


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国