

有效绿灯时间的确定
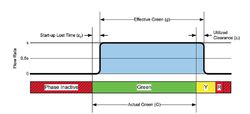
车流通过交叉口时的基本运动特性如图1所示,实际上表示的是停车线截面上驶入流率-时间的变化情况。其基本模式是由克莱顿(Clayton)于1940-1941年提出来的。后来,沃乔普(Wardrop),韦伯斯特和柯布(Cobbe)等学者沿用并发展了克莱顿的模式,使之成为这样一个图式。
公式:
g=effective green= G+Y-L
其中
g:有效绿灯时间,单位(s)
G:实际绿灯时间,单位(s)
Y:实际黄灯清空时间,单位(s)
L:损失时间,单位(s)
一般有效绿灯时间用小写g表示,实际绿灯时间用大写G表示,以示区分。
为了纠正绿灯间隔时间由“黄灯时间+全红灯时间”组成的传统错误概念,图中用文字“慢车最大清空时间与快车最小进入时间的差”代替了原图的“全红灯时间”。
图1所示的车流越过停车线的模式表明:当交通信号灯转变为绿灯显示时,原先等候在停车线后面的车流便开始向前运动,车辆鱼贯地越过停车线,其流率由0很快增至一个稳定的数值,即饱和流率。此后,越过停车线的后续车流流率将继续保持与饱和流率相等,直到停车线后面原先积存的车辆全部放行完毕,或者虽未放完,但放行时间已经截止。
从图1可见,在绿灯信号开始的最初几秒,流率变化很快,这是由于车流正处于起步和加速阶段,在此期间,通过停车线的车流流率要比饱和流率低。同理,在绿灯结束后的黄灯期间,因严禁闯红灯,有部分车辆已经开始减速,采取了制动措施,故通过停车线的车流流率便由饱和流率逐渐地降下来。
有一点值得注意,只有当绿灯期间停车线后始终保持有连续车队时,车流越过停车线时的流率才能稳定在饱和流量水平上。图1所表示的正是一个完全饱和的实例,即在通行结束前,始终都有车辆连续不断地通过停车线。
图1中矩形ABCD所包围的面积与实曲线包围的面积相等,恰好等于一次绿灯放行实际通过交叉口的车辆总数。矩形ABCD的高度为饱和流率,长度为有效绿灯时间,即一周期内能够用于以饱和流率通行的时间,等于实际绿灯时间与黄灯时间的和,再去掉起动损失时间。
从图1可以看出,绿灯信号的实际显示时间段与有效绿灯时间区段是错开的。在绿灯开始初期,车流难以饱和流率进入,因此损失的通行时间,称为绿初损失时间;临黄灯结束末期,越过停止线的车流已非饱和流率,因此损失的通行时间,称为黄末损失时间;绿初、黄末非饱和损失时间合并称为起动损失时间。1
最大有效绿灯时间在早期文献提出的单点交通控制问题中,作为线性规划问题,绿灯时间之和被选为优化目标Ⅲ],最佳信号方案最大化了这一目标。在R. Camus et al于ⅡIAESTED论坛上发表的论文中会找到另一种类似的问题阐述,该论文关注于复杂路口的交通控制,并以其目标函数为所有信号组或所有包括到达交通流信号组绿灯时间之和作为数学规划问题的描述。
这些目标函数表达如下:
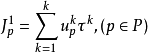
分配给信号组D’p的有效绿灯时间:
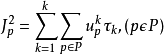
分配给信号组系列P子集Pc的有效绿灯时间总和:
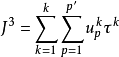
绿灯时间的总和,即:分配给所有信号组的有效绿等时间总和:
所列出的带有相应约束的优化目标定义了综合优化问题,即:在控制向量转换图上寻找最佳闭合路径以及最佳周期时间分配,对于一个给定的信号方案结构,信号方案优化问题简化为确定周期时间分配。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国