

火星探测史火星拓荒者之前发射史

火星1A号:前苏联,1960年10月10日
火星1B号:前苏联,1960年10月14日
卫星22号:前苏联,1962年10月24日
卫星24号:前苏联,1962年11月4日
探测器2号:前苏联,1964年11月30日
水手3号:美国,1964年12月5日
水手4号:美国,1964年12月28日
探测器3号:前苏联,1965年7月18日
水手6号:美国,1969年2月24日
火星2B号:前苏联,1969年4月2日
火星2A号:前苏联,1969年4月2日
水手7号:美国,1969年7月31日
水手8号:美国,1971年5月8日
宇宙419号:前苏联,1971年5月10日
火星2号:前苏联,1971年5月19日
火星3号:前苏联,1971年5月28日
水手9号:美国,1971年5月30日
火星4号:前苏联,1973年7月21日
火星5号:前苏联,1973年7月25日
火星6号:前苏联,1973年8月5日
火星7号:前苏联,1973年8月9日
海盗1号:美国,1975年8月20日
海盗2号:美国,1975年9月9日
福波斯1号:前苏联,1988年7月7日
福波斯2号;前苏联,1988年7月12日
火星观察者;美国,1992年9月25日
火星拓荒者之后发射史火星环球勘测者号:美国,1996年12月7日
火星96号:俄罗斯,1996年12月16日
希望号;日本,1998年7月3日
火星气候轨道器:美国,1999年1月3日
奥德赛:美国,2001年4月7日1
火星快车:欧盟,2003年6月2日
火星探测流浪者A:美国,2003年6月10日
火星探测流浪者B:美国,2003年7月7日
罗塞塔:欧盟,2004年3月2日
凤凰号:美国,2007年8月4日
萤火一号:中国,2011年11月8日
福布斯-土壤:俄罗斯,2011年11月8日
好奇号:美国,2011年11月26日
曼加里安号:印度,2013年11月5日
注:
美国国家航空航天局的火星探测计划长期致力于对火星这颗红色行星进行无人探测,火星拓荒者是这一系列无人探测计划的一个组成部分。
着陆过程1997年7月4日,携带火星探路者的飞船进入火星大气层,由降落伞带着以每小时88.5公里的速度飘向火星表面,并在着陆前数秒钟打开9个巨大的保护气囊。17时07分火星探路者在火星降落,在密封气囊的保护下,经过一番弹跳翻滚之后,在火星表面停了下来。着陆成功后,飞船打开外侧的3个电池板,重10公斤的6轮“旅居者”号火星车缓缓驶离飞船,落到火星地表。其行进路线是预先确定好的, 首先朝目标区西南部的一个长100公里、宽19.3公里椭圆形区域缓慢行进。
开始工作着陆成功后,飞船打开外侧的3个电池板,重10公斤的6轮“旅居者”号火星车缓缓驶离飞船,落到火星地表。其行进路线是预先确定好的, 首先朝目标区西南部的一个长100公里、宽19.3公里椭圆形区域缓慢行进。 在探测区,经对由古代洪水冲刷形成的一个488平方米的小岛作详尽观察,科学家发现火星山谷平原暴发过多次洪水,并有众多由水冲击而来的圆形岩石,其中许多岩石沿同方向排列,表明它们受到同样水流的冲击。科学家推测当时洪水有数百公里宽,水流量为每秒100万立方米。
携带品火星拓荒者于1997年7月4日在火星表面着陆。它携带的索杰纳号火星车,是人类送往火星的第一部火星车。
性能简介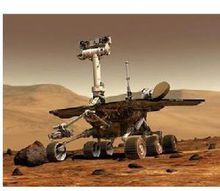 索杰纳是在火星上真正从事科学考察工作的第一台机器人车辆,它是一辆自主式的机器人车辆,同时又可从地面对它进行遥控。设计中的关键是它的重量,科学家们成功地使它的重量不超过11.5公斤。该车的尺寸为630mm×480mm,车轮直径13cm,上面装有不锈钢防滑链条。机器人车有6个车轮,每个车轮均为独立悬挂,其传动比为2000:1,因而能在各种复杂的地形上行驶,特别是在软沙地上。车的前后均有独立的转向机构。正常驱动功率要求为10瓦时,最大速度为0.4米/秒。
索杰纳是在火星上真正从事科学考察工作的第一台机器人车辆,它是一辆自主式的机器人车辆,同时又可从地面对它进行遥控。设计中的关键是它的重量,科学家们成功地使它的重量不超过11.5公斤。该车的尺寸为630mm×480mm,车轮直径13cm,上面装有不锈钢防滑链条。机器人车有6个车轮,每个车轮均为独立悬挂,其传动比为2000:1,因而能在各种复杂的地形上行驶,特别是在软沙地上。车的前后均有独立的转向机构。正常驱动功率要求为10瓦时,最大速度为0.4米/秒。
它是一辆自主式的机器人车辆,同时又可从地面对它进行遥控。索杰纳在太空中顺利地飞行了4.97亿公里,终于在今天以每秒钟7.4公里的速度进入了火星的引力范围。
小车由美国加利福尼亚州帕萨迪纳控制中心的科学家通过一台24英寸屏幕的工作站电脑操纵。科学家在操纵时采用了最新的虚拟现实技术。科学家们戴着三维眼镜,可以把在火星上空围绕火星运行的飞船拍摄的火星表面三维图像通过屏幕显示成具有深度感的立体视像。科学家可以从各个不同角度观看,操纵"索杰纳"小车绕过障碍物,安全地在火星表面漫游。
"索杰纳"小车在火星上执行指令的情况,仍由飞船拍摄下来,传送回地球,在电脑屏幕上显示出来。科学家根据这些图像,再决定小车下一步的行动。另外,小车上还安装了5台激光测距仪,可以依靠它们直接侦察周围地形,及时发现障碍物,寻找没有障碍的前进路线。
索杰纳是由锗基片上的太阳能电池阵列供电的,可在16伏电压下提供最大16瓦的功率。它还装有一个备用的锂电池,可提供150瓦/时的最大功率。当火星车无法由太阳能电池供电时,可由它获得能量。
索杰纳携带的主要科学仪器有:一台质子x射线分光计(APXS),它可分析火星岩石及土壤中存在哪种元素,并提供其丰度。APXS探头装在一个机械装置上,使它可以从各种角度及高度上接触岩石及土壤的表面,便于选择取样位置,它所获得的数据,将作为分析火星岩石成分的基础。
成就第一次在地球以外行星上没有经过绕行星旋转飞行就直接在行星上着陆。
第一次在航天器上使用超音速降落的降落伞。
第一次在航天器上使用气囊作着陆时的缓冲。
第一次使用自由下落方式在地球以外行星表面软着陆。
第一次从地球以外行星表面直接传回行星表面的图像。
第一次从地球以外发回彩色三维立体图像。
第一次把一辆可以在一定范围内四处活动的探测车送上地球以外的行星。让人类第一次对火星表面情况有了非常全面和细致的了解。
从1997年7月4日登上火星之后,索杰纳和探路者就开始传回那里的红色岩石的图像及每日的天气情况。在火星上工作的几个月里,索杰纳共行驶了90多米,分析了岩石成分,拍摄了500多幅照片,而登陆器的摄像机共拍摄了16000多幅图像,发回26亿比特的科学数据。索杰纳原来的设计寿命为7天,登陆器为30天以上。然而,索杰纳却工作了3个月,是原设计时间的12倍多。探路者的主发射机直到1997年9月27日才停止工作,它的微型辅助发射机直到10月6日仍发回信号,此后才陷入沉没之中。之后NASA的科学家们经过5个多月满怀希望的努力,想再与索杰纳及探路者取得联系,但终于以失败告终,于是他们把当地时间1998年3月11日下午1时21分作为探路者及索杰纳的死亡时间,这是在它登陆后的第250天。登陆器和火星车的寿命大大超出了科学家们的期望。2
发展趋势NASA下辖的约翰逊太空中心发言人波尔顿表示:“我们计划在2035年左右让第一个人登陆火星,现在是做准备的时候了,要先让机器人女武神号在火星创造出适合生命的环境。”由NASA制造的四个机器人,将充当人类在火星的拓荒者,这四个机器人已初具雏形,共有28处人工关节,以及200个感应器。
NASA将其中三台姊妹型机器人分别交给麻省理工学院、爱丁堡大学、美国东北大学。然而,目前这些高182厘米,重136公斤的机器人还问题重重,麻省理工学院的师生对此开玩笑地说,“它走起路来就像是一个手脚笨拙的人在跳芭蕾舞”。考虑到它们目前的造价已是两百万美金,东北大学教授帕迪尔也说:“这家伙看起来不太妙。”
主导此项目的霍利杨科教授特别指出,“虽然女武神号坚固的外壳足以防止火星沙尘暴的侵害,但它目前欠缺完好的通讯能力。这些机器人必须要在第一时间将讯号传回地球、执行地球的指令。因为任何的信号延迟,将意味着地球无法精准的远端操控这些机器人,以进行自我修复与建立适合人居的环境。”
虽然这些机器人还只能进行简单的肢体动作,参与此项机器人计划的美国东北大学助理教授罗伯特·普拉特乐观地表示:“机器人科技在过去五年有了非常大的进步,无人机、自动车的发展就是很好的例证。我在机器人领域上工作了几十年,面对的都是同样问题,但最近科技上的进步使我认知到,事情将要有所变化了。”3
总体评价1997年7月4日美国独立日这天,NASA的“拓荒者号(Pathfinder)”自1976年“维京1号(Vikin)”在火星着陆21年后成功地在火星上着陆。“拓荒者号”此次着陆创造了一系列纪录:首次未环绕轨道就降落在星球上;首次在时速1600公里的超声速一F使用降落伞;首次使用气囊减缓着陆时的冲击力。“拓荒者号”在着陆7小时后即传回了黑白照片,稍后又传回了彩色照片。而这次任务与第一次登上火星的“维京1号”任务相比,其研制周期仅为后者的三分之一,经费也只是后者的一部分。美国总统克林顿在赞誉NASA的这一成就时说,这次任务充分显示了NASA崭新的高效能企业化精神。45

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国