

在21世纪初期,α国际空间站和先进的空间平台/航天器将被发射入轨。NASDA目前正在研究无人有翼往返运输系统HOPE以及与SS共轨的空间平台。HOPE将是日本航天史上第一个可重复使用的空间运输系统。为了实现这些空间计划,必须开发一些先进的航天技术,例如RVD技术以及利用空间机器人的在轨服务技术等,NASDA筑波空间中心已经针对这些关键技术进行了研究。1
RVD技术是开发空间平台、轨道服务器(OSV),JEM后勤服务器、HOPE以及月球探测器等空间设施的先决条件,这些空间设施可进行各种不同的空间活动,诸如:航天器在轨修复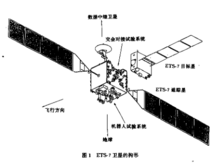 、原料、消耗品和设备的补给和交换等。通过HOPE为SS提供后勤支持的任务必须在2l世纪初期实现,HOPERVD的特点是由无人航天器向载人航天器SS实现交会对接。
、原料、消耗品和设备的补给和交换等。通过HOPE为SS提供后勤支持的任务必须在2l世纪初期实现,HOPERVD的特点是由无人航天器向载人航天器SS实现交会对接。
上述领域的研究工作起动于70年代初期,针对ETS一ⅣRVD系统的基础性研究工作已在1992年到1993年间完成。ETS—VIIRVD试验计划是NASDA的第一次在轨验证试验,被认为是NASDA开发RVD技术的第一步曲。ETS—VII卫星将于1997年采用H一Ⅱ火箭发射到观测热带雨林(TRMM)的工作轨道,其目的在于发展高度自动的RVD技术和空间遥操作机器人技术。2
日本的一些研究机构均参加ETS一Ⅶ卫星的研制,参加的机构及其试验仪器如下:
①高性能机械臂(通产省电子技术综合研究所)
②天线组合机构(通信综合研究所)
③析架结构(航空宇宙研究所)3
ETS-7空间飞行试验有三项内容:(1)自主自动空间交会对接飞行试验(RVD);(2)空间机器人技术试验(RBT);(3)通过教据中继卫星对多星测控。1
组成和轨道ETS-VII由东芝公司生产,总质量3.0t,其中追踪卫星2.5t,目标卫星0.5t。用H-2火箭把“热带降雨观测卫星”(TRMM)和ETV-VII采用一箭双星发射方式送到高350km、倾角35°的圆轨道,然后,ETV-VII通过星载变轨发动机进入550km圆轨道,追踪星与目标星分离。4
跟踪星采用已成功发射的“先进地球观测卫星”(ADEOS)所采用的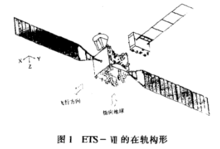 高精度零动量三轴姿态控制方式,在稳态运行的全过程一直保持高精度三轴姿态控制,确保在每23小时内(15个轨道周期)完成1次RVD以及顺利地完成空间遥控操作机器人(RBT)试验。4
高精度零动量三轴姿态控制方式,在稳态运行的全过程一直保持高精度三轴姿态控制,确保在每23小时内(15个轨道周期)完成1次RVD以及顺利地完成空间遥控操作机器人(RBT)试验。4
目标星也是采用三轴控制,在RVD试验中可保证目标星在自由飞行过程中指向地球,提供满足试验所需的环境。
工作原理ETS一Ⅶ由进行RVD试验的主动跟踪卫星和靶卫星这两颗卫星组成。主动跟踪卫星与靶卫星分离后,在达到最大相对距离30~50km时,用GPS接收机和光学敏感器(交会雷达、转向敏感器)进行高精度相对接近,在安全的速度下对接。
为了进行RBT试验,搭载了(远距离操纵型)遥控型机械臂,进行机械臂动作和卫星姿态控制系统的协调控制试验;用控制台进行各种远距离操纵试验;用轨道替换单元(ORU)进行轨道上的仪器交换;推进剂补给模拟试验等。此外,这些技术试验的地面控制经由数据中继卫星(COMET)S进行,从中掌握如何通过数据中继卫星传输,进行轨道上作业的应用技术。3
ETS-VII遥操作系统由星上机器人系统和地面控制系统组成。星上机器人系统主要包括机器人手臂、视觉系统、星上机器人控制系统以及包括ORU、任务版、目标卫星操作工具(TSTL)等在内的机器人手臂载荷等几个组成部分。而地面操作系统通过数据中继卫星的通信链路远程遥操作机械臂。ETS-VII机器人系统有两种远程控制模式:一是非间隔命令的远程编程模式;二是利用时间间隔命令的远程操作模式。
关键技术ETS-VII要完成自主交会对接任务,导航制导技术十分重要。ETS-VII有3中导航方式,每种方式的选择根据两星之间的距离而定:当两星距离在2m以内时,安装在追踪星上的相机敏感器测量两星相对位置和位姿;在2-500m时,采用激光雷达测量两星的相对位置和位姿;大于500m时,采用GPS接收机测量两星的相对位置和速度。追踪星接近目标星的轨迹由星上计算机根据测量数据计算得到。
ETS一Ⅶ卫星交会对接技术可归纳为下列四类:
(a)交会对接部件技术:检验为执行ETS一Ⅶ卫星交会对接任务的部件设计的正确性,例如制导和控制计算机(GCC)、逼近摄像敏感器PXS、交会激光雷达RVR、GPS接收机以及对接机构DM等;
(b)交会对接制导、导航和控制技术(GNC):检验GNC系统功能,包括RVD系统软件的功能;
(c)交会对接飞行管理和运行操作技术:检验交会对接运行操作系统,包括星载系统和地面系统以及远距离操纵的能力;
(d)先进交会对接技术:演示先进摄像敏感器等等。2
性能参数发射时间:1997年11月
运载火箭:H-2(和热带雨林观测卫星一起发射)
轨道:高度550千米,倾角35°的圆轨道
发射重量:总重3.0吨,其中跟踪星2.5吨,目标星0.5吨
发电能力:跟踪星2.4千瓦,目标星0.6千瓦
主要飞行任务:RVD技术试验和空间机器人技术试验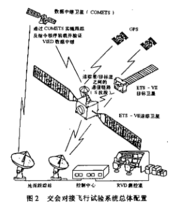
运行方式:利用1997年发射的“通信广播试验卫星”(COMETS)进行数据中继(S波段)
通信数据处理系统:跟踪星:采用S波段高增益、全向天线和USB全向天线;目标星:采用S波段和USB全向天线;跟踪星和目标星之间:采用S波段报文分组数据处理+CU-RIU数据处理系统
电源盒太阳电池帆板系统:50V非稳定总线;Si太阳电池/刚性帆板
姿轨控制系统:跟踪星和目标星是均采用三轴姿态控制
结构、热控系统:采用帆板/中央圆桶式结构和被动式热控系统
推进系统:20N单元液体肼推力器;1N冷喷气推进系统4
寿命:约1.5年
意义ETS一Ⅶ的试验项目比较新颖,将RVD、RBT两种技术结合在一起,用机械臂操纵靶卫星,在世界上首次进行对接试验。
ETS-VII是世界上首颗带有机械臂的卫星,其发射成功是在轨服务空间机器人研制中的一个重要的里程碑事件,极大推动了世界各航天国家对在轨服务的研究。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国