

简介
飞机飞行时,由于速度、重心以及气动外形等的变化不可避免会造成力矩的不平衡,需要配平系统来补偿。CCAR-25作为民用运输类飞机适航取证必须遵循的适航标准,对民用运输机的三轴配平有着明确的要求:要求飞机在正常预期的运行条件下,当重心在有关的使用限制范围内有最不利的横向移动时,飞机必须能维持横向和航向配平;要求飞机在最大连续功率(推力)爬升或无动力下滑过程中,无论襟翼处于收起位置还是起飞/放下位置,或飞机进行平飞加减速时,都要能维持纵向配平。为此,民用飞机必须设计恰当的配平系统来满足配平功能的各项要求。1
民用飞机的配平系统民用飞机的配平系统通常主要有4种方式,除人工配平外,还有自动配平、马赫数配平和速度配平。
人工配平由驾驶员通过配平手轮等装置手动操纵,手动或电驱动配平机构,通常可进行3个轴向的配平操纵。马赫数配平主要在高速飞行时使用,用于补偿跨音速飞行时焦点后移所产生的下俯力矩并自动平衡纵向力矩、增加大马赫数时的飞机稳定性,以马赫数为配平系统输入。速度配平则在放下襟翼(起飞或着陆的低空飞行时)的低速飞行状态下使用,以速度作为配平系统的输入。自动配平的作用主要是在平衡状态下消除作用在自动驾驶仪舵机上的铰链力矩,避免自动驾驶仪断开时舵机负载突变产生过大的扰动。目前,自动配平多数仅限于俯仰通道。
为实现俯仰自动配平,不同的飞机可选择采用以下3种主要的配平机构,即调效配平机构、可配平的水平安定面和配平调整片。调效配平机构主要用于助力操纵系统中,而通常大型飞机会利用可配平的水平安定面进行有行程限制的俯仰配平。
俯仰配平调整片是位于升降舵后缘的可偏转的小翼板,其偏转与升降舵的偏转是彼此独立的。由于调整片距离舵面铰链较远,适当使调整片相对于舵面反向偏转,可以有效减小舵面的铰链力矩。同时,由于调整片面积很小,对舵面的升力影响可忽略。现役的支线客机和商务/通用飞机多采用此种机构实现俯仰自动配平。1
某型客机俯仰自动配平系统简介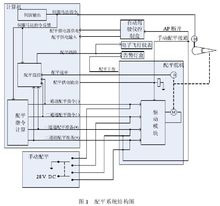 右图所示的俯仰自动配平系统用于某型支线客机,参与俯仰自动配平系统工作的主要部件包括:
右图所示的俯仰自动配平系统用于某型支线客机,参与俯仰自动配平系统工作的主要部件包括:
a)数字式双余度自动驾驶仪计算机:两个余度的基本功能及配置基本相同,在配平系统中主要用于配平指令的解算与输出,以及配平系统的监控和自动断开;
b)自动驾驶仪控制盒:通过其上的自动驾驶仪接通手柄实现自动配平功能的人工接通与断开;
c)配平舵机:接收来自自动驾驶仪计算机的配平指令,驱动调整片偏转。
俯仰自动配平是自动驾驶仪的一个子功能。接通自动驾驶仪后,自动驾驶仪控制盒向自动驾驶仪计算机发送配平继电器供电信号以及配平供电输入信号,自动驾驶仪计算机通过向配平舵机发送配平供电输出信号,给配平舵机的接通线圈供电,接通自动配平功能。自动驾驶仪计算机通过伺服马达指令反馈信号进行配平指令的计算,根据配平方向,两个通道分别输出配平指令信号以及配平准备信号至配平舵机,并通过配平舵机的驱动模块驱动电机转动,从而带动调整片偏转使作用在升降舵舵面上的铰链力矩减小,最终目标是使铰链力矩降至预置门限内。
配平舵机工作时向告警灯盒发送配平工作信号,点亮机上配平灯。自动驾驶仪计算机中的配平监控环节使用伺服马达指令反馈信号、配平指令信号、配平准备信号以及来自配平舵机的配平速率信号实现配平系统监控,当发现配平系统故障时,向机上告警灯盒发送配平故障信号,点亮相应故障灯。同时,自动驾驶仪计算机通过总线向电子飞行仪表系统发送配平故障信号,并通过其进行显示。
通常,人工配平接通时要求自动配平断开。本系统可通过按压手动配平开关来切断自动驾驶仪,即断开了自动配平而转换至人工配平方式。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国