

混沌作为一种复杂的非线性运动行为,在物理学、气象学、电子学、信息学和经济学等领域得到了广泛的研究。其中为了利用混沌而展开的应用研究越来越引起人们的重视,并成为混沌研究的前沿课题和发展方向之一。1990年,美国海军实验室的L. M.Pecora和T. L. Carrol提出混沌自同步方法, 首次利用驱动-响应法实现了两个混沌系统同步,从而拉开了混沌同步方法研究与应用的序幕。
混沌同步,从总体上说,属于混沌控制的范畴。但由于混沌自身的特点,同步方法不完全和传统的以抑制混沌为主的控制方法相同。传统的混沌控制一般是将系统稳定在不稳定的周期轨道上,混沌同步则是实现两个系统的混沌状态的完全重构。
混沌同步控制的定义及其原理考虑如下两个非线性动力系统

其中x , y∈ R分别为系统的状态变量。F,F‘为非线性映射,U为同步控制量。如果存在

有

成立,则系统(1b)和系统(1a)同步。称系统(1a)为驱动系统,系统(1b)为响应系统, 为同步区域。如果F= F′,则称为自同步。该定义不仅适于混沌同步,而且也适于非混沌同步,还可拓广至超混沌同步。
为同步区域。如果F= F′,则称为自同步。该定义不仅适于混沌同步,而且也适于非混沌同步,还可拓广至超混沌同步。
令e=x-y为误差向量,则同步误差系统:

相应地,由误差系统在原点处的稳定性,可得到系统同步稳定性原理。在混沌同步中,目前主要根据Lyapunov 稳定性原理和由L. M. Pecora 和T.L.Carrol提出的条件Lyapunov指数判据来判断同步稳定性。
混沌同步控制方法混沌同步,从总体上说,属于混沌控制的范畴。但由于混沌自身的特点,同步方法不完全和传统的以抑制混沌为主的控制方法相同。传统的混沌控制一般是将系统稳定在不稳定的周期轨道上,混沌同步则是实现两个系统的混沌状态的完全重构1。
驱动-响应同步法Pecora和Carroll针对可分的混沌系统
将其状态变量分解为u和v两部分,其中
这样就得到驱动-响应总的动力学系统:
式中u为驱动变量。令e=v-w,则得到系统自同步的误差系统 。可用前面的判据来判别同步的稳定性,即只有当响应系统的所有条件Lyapunov 指数都是负值时,才能达到响应系统和驱动系统的同步。
。可用前面的判据来判别同步的稳定性,即只有当响应系统的所有条件Lyapunov 指数都是负值时,才能达到响应系统和驱动系统的同步。
该方法的主要特点是:两个非线性动力学系统之间存在着驱动与响应(Drive-Response)关系。响应系统行为取决于驱动系统,而驱动系统的行为与响应系统的行为无关。对于某些实际的非线性系统,由于物理本质或天然特性等原因,系统无法分解,这时,驱动-响应同步方法也就无能为力了。
主动-被动同步法主动-被动的同步方法由L.Kocarev和V.Parlitoz于1995年提出。假设一个自治非线性动力学系统为
将它改为非自治形式:
复制一个相同的系统:
变量差e=x-y的微分方程:

显然,该式在e= 0处有一稳定的不动点,故存在一个稳定的同步态:x = y 。
应用Lyapunov函数或线性稳定性分析方法(在e为小值情况下),可证明:只要非自治的条件Lyapunov指数都是负值,由x和y所表示的两个混沌系统就能实现同步。
因y式不被驱动时,即s(t)=0,它是一个趋向不动点的被动系统(或称无源系统),因此称该同步方法为主动-被动(或有源-无源)同步方法。
该方法的优点是可以不受任何限制地选择驱动信号的函数,因此,十分灵活且具有较大的普遍性和实用性,且把驱动-响应同步法作为特例包括在内。在很多情况下,s(t)可以是一般函数,它不仅依赖于系统的状态x而且可以与信息信号i(t)有关,即s(t)=h(x,i) 或s=h(x,i,s)。该特点使主动-被动同步方法特别适合于保密通信方面的应用。
耦合同步法耦合同步法由A.V.Gaponov-Grekhov在80年代研究流体湍流时提出。1994年,美国学者Roy与Thornburg及日本学Sugawara,Tachikawa等人分别独立地从两个混沌激光系统的实验中观察到了同步现象。大量研究表明:相互耦合的混沌系统在一定条件下,可实现混沌同步。Kapitaniak和Chua等人用相互耦合的方法,使两个Chua 氏电路达到了混沌同步。Chua氏电路的状态方程可简写为:
其中

考虑下列两个线性相互耦合的Chua氏电路:
电路1:
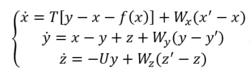
电路2:
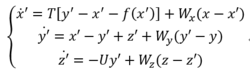
当参数T=10.0,U=14.87,a=-1.27,b= 0.65时,Chua式表示的蔡氏电路处于混沌态,可以证明,耦合系数取值为
(1)
(2)
(3)
时,电路1和电路2能实现混沌同步相互耦合的非线性系统,动力学行为十分复杂,到目前为止尚无一般的普适性理论。但相互耦合的非线性系统在自然界中普遍存在,因此,对这种同步方法的理论和实验研究具有重要意义。
连续变量反馈同步法1993年,K.Pyragas 提出了一种非线性连续混沌系统的控制方法。后来这一思想被用来研究两个混沌系统的同步问题,其同步原理如图所示:
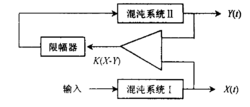
由混沌系统Ⅰ和混沌系统Ⅱ组成的同步系统方程为:
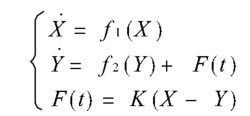
F(t)与两个系统的状态变量的差值成正比,它作为小微扰信号反馈到系统Ⅱ中。只要选取适当的系数K,系统Ⅰ和混沌系统Ⅱ就可以达到同步。
连续变量反馈同步法简单,易于实现,具有一定的实用价值。根据具体系统,可以灵活采用单变量、多变量甚至所有系统变量反馈微扰。研究表明:反馈变量的最小数目应等于无微扰系统的正的Lyapunov指数的数目,而且多变量反馈比单变量反馈更为有效,收敛的速度更快。
不同方法比较分别用驱动-响应同步,相互耦合同步、反馈微扰同步、自适应控制同步和脉冲同步方法,对Lorenz混沌系统的同步建立时间和对参数变化的敏感性进行仿真,结果见表:
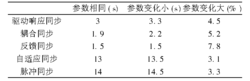
Lorenz电路反馈微扰同步对参数的变化的鲁棒性最好,同步建立最快,系统安全性好。而自适应同步和脉冲同步的同步建立时间比较长,对参数的变化的鲁棒性差,采用的方法相对较复杂,但安全性最好。从同步建立时间和对参数变化的鲁棒性来看,反馈微扰同步方法更优。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国