

简介
现代控制系统中控制对象可能是复杂、分散的,而且往往是并行、独立工作的,但整体上它们是相互关联的有机组合。因此,控制信号的时序逻辑则要求更加精确。1网络延时控制多以可编程线延时芯片和单片机为基础,通过设计可编程延时控制系统,以达到对时间进行精密时延控制的需求。2同时,作为大型复杂控制装置的一个重要组成部分,多传感器延时控制系统(Multi—sensorDelay Control System,MDCS系统)还要负责给出一个关键延时参数的估计。3
系统结构闭环网络延时控制系统的结构如图所示。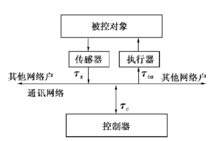 τsc表示传感器到控制器的传输延时; τc表示控制器对从传感器接收到的数据包进行解包、解码,实施控制算法并将结果编码、打包所需要的时间,称为控制器计算延时; τca表示控制器到执行器的传输延时。因此,网络总延时可以表示为τ = τsc+ τc + τca。τc可以认为是恒定值,并可以等价地归入τca中。而τsc和τca则根据控制网络的不同或是恒定的或是时变的。所以系统的总延时可以简单地表示为
τsc表示传感器到控制器的传输延时; τc表示控制器对从传感器接收到的数据包进行解包、解码,实施控制算法并将结果编码、打包所需要的时间,称为控制器计算延时; τca表示控制器到执行器的传输延时。因此,网络总延时可以表示为τ = τsc+ τc + τca。τc可以认为是恒定值,并可以等价地归入τca中。而τsc和τca则根据控制网络的不同或是恒定的或是时变的。所以系统的总延时可以简单地表示为
τ = τsc + τca。
基本问题在网络延时控制系统中,网络是控制系统的各种信息进行传输和交换的唯一通道。网络数据传输中存在的一些基本问题,包括时变传送周期、网络诱导时延、对象输入输出的单包和多包数据传送以及网络的数据丢包等,影响到延时控制系统的建模、系统的分析和设计。
时变传送周期常规的计算机延时控制系统理论中,假定对象的输出是等间隔采样的,也就是说是在时间间隔kh( k = 0,1,…) 上周期地采样的,这里的h 就是固定的采样周期。这种假设就引出了线性时不变采样系统,并且大地简化了系统的稳定性和性能分析。然而,这种等间隔采样的假设不能用于对网络延时控制系统的分析。在网络延时延时控制系统中样本的传送可能是周期性的或非周期性的。这主要取决于控制网络的介质访问控制协议( Medium Access Control protocol,简称MAC 协议) 。MAC 一般分成两类: 随机访问和调度。载波侦听多路存取( CSMA) 就常用于随机访问网络中,而令牌传送( TP) 和时分多址( TDMA) 一般使用于调度网络。4
网络诱导时延网络延时控制系统中的网络诱导时延是当传感器、执行器和控制器在网络中传输数据时产生的。如果不考虑这种时延将会降低延时控制系统的性能,甚至会引起系统不稳定。随机访问的网络中数据包受随机时延的响,数据包最坏的传输时间是无限。因此,CSMA 网络通常被认为是不确定的。然而,如果网络信息被区了优先级,则较高优先级的信息具有一个比较好的及时传输的机会( 如CAN 和设备网) 。4
单包和多包数据传输单包传输的意思就是把传感器和执行器的数据打成一个网络数据包,然后在同一时间传输,而多包传输中,传感器和执行器数据以各自的网络数据包形式传输,它们有可能不同时到达控制器和对象。多包传输现的原因:
1) 由于受数据包大小的限制,数据包转换网络在一个数据包中只能携带有限的信息,因此,大的数据必须分成多个包传输;
2) 网络延时控制系统中的传感器和执行器常常分布在一个很大的范围内,这样就不可能把数据都放到一个网络包里面。常规的数据采样系统假定对象输出和控制输入是在同一时间内传的,这可能在多包传输的网络延时控制系统中是不正确的。由于网络访问时延,控制器可能在控制计算时不能接收到对象输出的所有更新数据。4
网络的数据丢包网络的数据丢包发生在出现节点发送失败或信息冲突的网络延时控制系统中。尽管大多数网络协议都有重发机制,但重发次数有限,最后一次中断之后,包就丢失了。此外,对于实时反馈控制数据,比如传感器测量值和计算出的控制信号,如果可能的话,丢弃旧的和未发送的数据,然后重新发送一个新的数据包可能会更好,这样,控制器一直都能接收到用于控制计算的最新数据。4
研究现状确定性状态增广离散时间模型方法在带定长时延的离散时间系统中,用的最多最广泛的一种网络控制方法是状态增广法。它通过将经过延迟的对象的输入输出变量作为增广状态,并建立新的状态空间方程,与原始状态方程联立共同来描述系统。增广状态的维数与系统状态维数、输入维数以及时延大小有关,因而描述系统的增广状态方程的维数常常变得很大,系统的复杂性也相应地大幅度增加。
队列方式如图基于队列方式的时延补偿方法结构图Luck 和Ray 得出了基于随机时延的网络延时控制系统的补偿方法。时延补偿是利用观测器来估计对象状态,利用预估器来计算基于过去测量信号的预测控制输入。时延补偿算法的结构框图如图所示。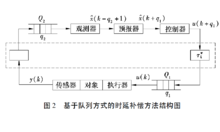
为了保存过去的测量信号,这些数据必须被存储在一个先进先出的队列中( 如图中的Q2) ,控制器的预测控制输入则存放在执行器的另一个队列( 如图中的Q1) ,因此,传感器到控制器的时延和控制器到执行器的时延都转换成了不变时延。同时,将具有随机时延的网络延时控制系统变成不变时延系统,因而系统的控制变得简单了。
由于观测器和预估器的性能在很大程度上依赖于模型的准确性,因而要实施这种方法就要求获得对象的精确模型; 同时,队列的使用也在系统中引入了额外的时延,因而获得的控制性能是保守的。
混沌方法混沌方法是由Walsh、Beldiman 和Bushneu 提出的。该方法使用时间驱动的传感器、事件驱动的控制器和事件驱动的执行器。只有从传感器发送出去的数据信息经过网络传输。该控制回路由一个非线性控制器和一个非线性对象组成。但是,该方法中使用的相似分析也可以用于线性系统,如图是系统框图。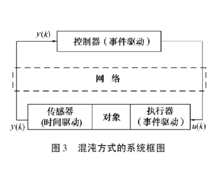
这种方法可用于循环系统和随机访问类型的网络,但是这些网络必须是严格的基于优先级的网络。这意味着网络可以分配不同的优先级给系统中传输数据的部件。这些优先级在每个信息的数据帧中以编码形式存在,优先级编码的数量取决于不同的协议。这些优先级可以是固定的,也可以是变化的,固定的和变化的优先级调度算法分别叫做静态调度和动态调度,此外,还有一种新颖的动态调度协议称为TOD( Try-Once-Discard) ,在TOD 协议中,传感器传输信息的优先级由原来和现在的数据误差决定。当从具有最高优先级的传感器传输信息时,其他传感器的信息将会放弃。
不同于原先的办法,混沌方法的关键在于将网络延时控制系统的传输时延影响表示为不考虑观测噪声时连续时间系统的混合,这时需要采样周期非常小,这样网络延时控制系统才能近似于连续时间模型。混沌方法最大的优点是它能应用于非线性系统,然而,这种方法不能用于包含控制器到执行器时延的系统。
采样时间确定方式这种方法的基本观点是为离散时间网络延时控制系统选择一个合适的足够长的采样周期,以致通讯时延不会影响控制性能,并且系统仍能保持稳定。在这种情况下,离散时间控制回路的控制时延τk必须假设小于控制回路的采样周期T。控制回路由时间驱动的传感器和控制器以及事件驱动的执行器构成。这种方法可以用于循环服务网络,在这种网络中,所有系统元件的连接是事先知道的。这种方法不仅能解决周期性时延问题,而且还能增加网络的利用率。
增益自适应补偿方法增益自适应方法利用增益的自适应调整来补偿网络控制中服务品质QoS( Quality of Service) 的变化,通过监测网络QoS,再根据给定的网络QoS 自调整控制器参数,以提供最好的控制性能,克服了扰动方法存在的不足。此方法中采用两个服务品质QoS 量来定义终端—终端用户的服务品质: 第一个代表点对点的网络容量QoS1,表明信号打包后通过网络采样或传送的速度; 第二个代表最大包点对点的最大时延QoS2,表明一个包从中央控制器传送到远程控制器所需时间。增益自适应方法有效解决了延时控制系统的不确定性时延问题,并在快速响应的运动延时控制系统中验证了有效性,较以往的控制策略具更广的适用范围,但控制器参数的自适应调整力度有限,不适用于长时延网络延时控制系统。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国