

如果飞机趋向于返回它先前的位置就称之为静稳定的。如果飞机继续偏离就称之为静不稳定的。最后,如果飞机趋向于保持在受扰动后的位置就称之为中立稳定的。 飞机为稳定性的增加会导致可控性的减小,所以飞机稳定性的上限就是可控性的下限。
静不稳定产生机理高超声速飞行器飞行过程出现静不稳定现象的原因主要有以下两个方面:
(1)高超声速飞行器推力/机体一体化的独特气动外形。高超声速飞行器推力/机体一体化的通用气动外形如图1所示。其前体既是飞行器机体的一部分,同时前体产生的激波又是超燃冲压发动机的预压缩气体,为超燃冲压发动机的进气道所捕获。同样,后体既是飞行器机体的一部分,又是发动机出口的扩张段。
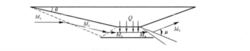
由于飞行器前体较长,且质量分布较小,因而使得飞行器的质心很难配置在飞行器压心之前。同时,前体在飞行过程中产生较大的附加升力,使得飞行器的压心进一步前移。位于飞行器腹下的发动机进气道还会产生附加的气动力矩。因此,正常情况下,乘波体外形的高超声速飞行器在气动特性上将是静不稳定的。
尽管X一43A高超声速飞行器通过头部配重可以使飞行器处于静稳定状态,但这种情况也仅适用于短时间的飞行试验。在长航时飞行时,通过头部配重将是不可取的,因为通过配重调整飞行器的质心,将会使飞行器的整体变重,降低飞行器的有效载荷,增大飞行器的平衡攻角;在同等燃料的情况下,会减小飞行器的航程。
(2)高超声速飞行器人为设计为中立稳定或静不稳定。这种情况主要利用中立稳定或静不稳定时可以减小飞行器巡航飞行时的配平舵偏,降低飞行器的阻力,在同等燃料的情况下,会增大飞行器的射程。
综上所述,未来高超声速飞行器在长航时飞行时,将会出现静不稳定问题,因此,高超声速飞行器飞行控制技术必然面临静不稳定控制的挑战。
静不稳定度对舵机的影响静不稳定成为高超声速飞行器发展的必然趋势,而舵系统固有频率随着飞行器静不稳定度的增加而非线性增长。图2为舵系统固有频率与飞行器静稳定度之间的关系图。
由图2可以看出静不稳定飞行器要求舵系统有更高的工作频率,同样快速的情况下,静稳定飞行器与静不稳定飞行器相比允许用固有频率1/2到1/3的舵系统。相反,使用同样固有频率的舵系统.静不稳定飞行器对指令的反应时间是静稳定飞行器的2倍。
同时高超飞行器作为远程打击武器,重量大,飞行速度快,需要抑制助推分离带来的大扰动,因此负载力矩要求较大。
另外,由于高超声速飞行器高精度姿态控制要求,需要尽可能地提高舵机控制精度,减少摩擦、间隙等非线性。
因此,未来高超声速飞行器用舵机需要在现代舵机基础上具备高频带、高控制精度、大力矩、小非线性的特点。1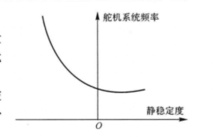
本词条内容贡献者为:
张磊 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国