|
谷歌大脑提出TCN,让机器人边看视频边模仿雷锋网 2017-06-02 |
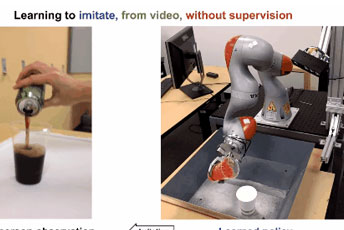
在「Time-Contrastive Networks: Self-Supervised Learning from Multi-View Observation」这篇论文中,谷歌的研究者提出了一种从观察中学习世界的新方法。雷锋网本期译制视频多角度展示了机器人仅仅通过观看视频,就能在无人监督的情况下,模拟视频动作的全过程。

除了视频演示之外,谷歌大脑并未对机器人系统提供监督学习。他们将这种方法运用于各种不同的任务,以此来训练真实和虚拟机器人。例如,倒水任务,放碟任务,和姿势模仿任务。

第一步
通过视频的分解镜头来学习,将时间作为监督信号,发现视频的不同属性。这组嵌入向量经由一组非结构化和未标记的视频训练,里面含有和任务相关的有效动作,也有一些随机行为,来体现真实世界中的各种可能状态。

模型使用triplet loss误差函数,基于同一帧的多视角观察数据来训练多视角下同时出现的帧,在嵌入空间中互相关联。当然也可以考虑一个时间对比模型,只根据单一视角来训练。这一次,有效帧在锚点的一定范围内随机选定,根据有效范围计算边际范围。无效范围是在边际范围外随机选定。模型和之前一样进行训练。
第二步
通过强化学习来学习规则。基于TCN嵌入,根据第三方的真人示范来构造奖励函数。机械臂起初尝试一些随机动作,然后学会反复进行这些动作,就可以产生最高奖励的控制步骤,最后达成重现视频任务的效果。

模型在仅仅经历了9次迭代后就成功收敛,大约相当于现实世界15分钟的训练。同样地,在移碟任务中,机器人最初尝试随机运动,然后学会成功拿起和移动一个盘子。

责任编辑:杨茗
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




